Collect Resets & Train RL Policy#
Reproduce our training results from scratch.
Tip
Want to try it quickly? Start with Cube Stacking or Peg Insertion. They have the fastest reset state collection times and converge within ~8 hours on 4×L40S GPUs.
Note
Skip directly to Step 4 if you want to train an RL policy with our pre-generated reset state datasets. Only run Steps 1-3 if you want to generate your own.
Step 1: Collect Partial Assemblies (~30 seconds)
python scripts_v2/tools/record_partial_assemblies.py --task OmniReset-PartialAssemblies-v0 --num_envs 10 --num_trajectories 10 --headless env.scene.insertive_object=fbleg env.scene.receptive_object=fbtabletop
Step 2: Sample Grasp Poses (~1 minute)
python scripts_v2/tools/record_grasps.py --task OmniReset-Robotiq2f85-GraspSampling-v0 --num_envs 8192 --num_grasps 1000 --headless env.scene.object=fbleg
Step 3: Generate Reset State Datasets (~1 min to multiple hours depending on the reset and task)
# Object Anywhere, End-Effector Anywhere (Reaching)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectAnywhereEEAnywhere-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=fbleg env.scene.receptive_object=fbtabletop
# Object Resting, End-Effector Grasped (Near Object)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectRestingEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=fbleg env.scene.receptive_object=fbtabletop \
env.events.reset_insertive_object_pose_from_reset_states.params.dataset_dir=./Datasets/OmniReset \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
# Object Anywhere, End-Effector Grasped (Grasped)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectAnywhereEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=fbleg env.scene.receptive_object=fbtabletop \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
# Object Partially Assembled, End-Effector Grasped (Near Goal)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectPartiallyAssembledEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=fbleg env.scene.receptive_object=fbtabletop \
env.events.reset_insertive_object_pose_from_partial_assembly_dataset.params.dataset_dir=./Datasets/OmniReset \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
Step 3.5: Visualize Reset States (Optional)
Visualize the generated reset states to verify they are correct. By default all four reset distributions are loaded; use the tabs below to visualize one at a time.
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
env.scene.insertive_object=fbleg env.scene.receptive_object=fbtabletop
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectAnywhereEEAnywhere \
env.scene.insertive_object=fbleg env.scene.receptive_object=fbtabletop
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectRestingEEGrasped \
env.scene.insertive_object=fbleg env.scene.receptive_object=fbtabletop
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectAnywhereEEGrasped \
env.scene.insertive_object=fbleg env.scene.receptive_object=fbtabletop
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectPartiallyAssembledEEGrasped \
env.scene.insertive_object=fbleg env.scene.receptive_object=fbtabletop
Step 4: Train RL Policy
Train with our pre-generated cloud datasets:
python -m torch.distributed.run \
--nnodes 1 \
--nproc_per_node 4 \
scripts/reinforcement_learning/rsl_rl/train.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-v0 \
--num_envs 16384 \
--logger wandb \
--headless \
--distributed \
env.scene.insertive_object=fbleg \
env.scene.receptive_object=fbtabletop
Or, train with your locally generated datasets from Steps 1-3:
python -m torch.distributed.run \
--nnodes 1 \
--nproc_per_node 4 \
scripts/reinforcement_learning/rsl_rl/train.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-v0 \
--num_envs 16384 \
--logger wandb \
--headless \
--distributed \
env.scene.insertive_object=fbleg \
env.scene.receptive_object=fbtabletop \
env.events.reset_from_reset_states.params.dataset_dir=./Datasets/OmniReset
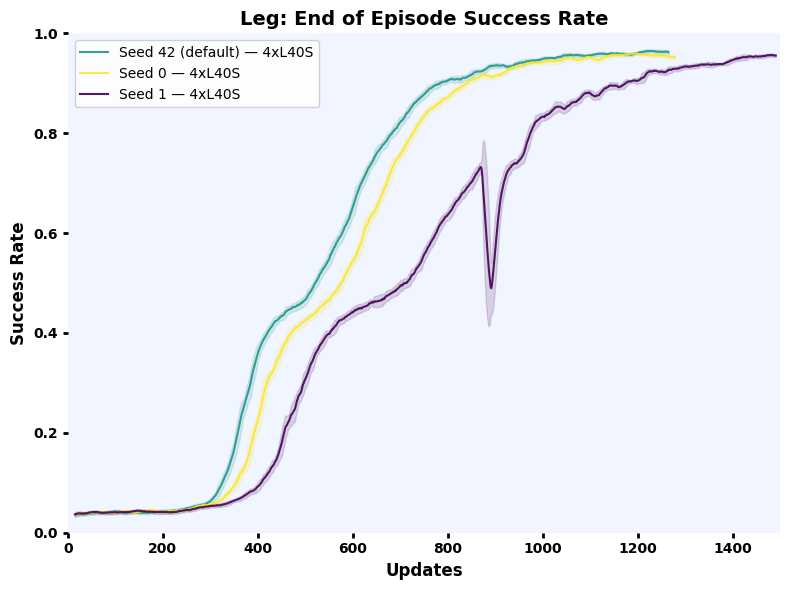
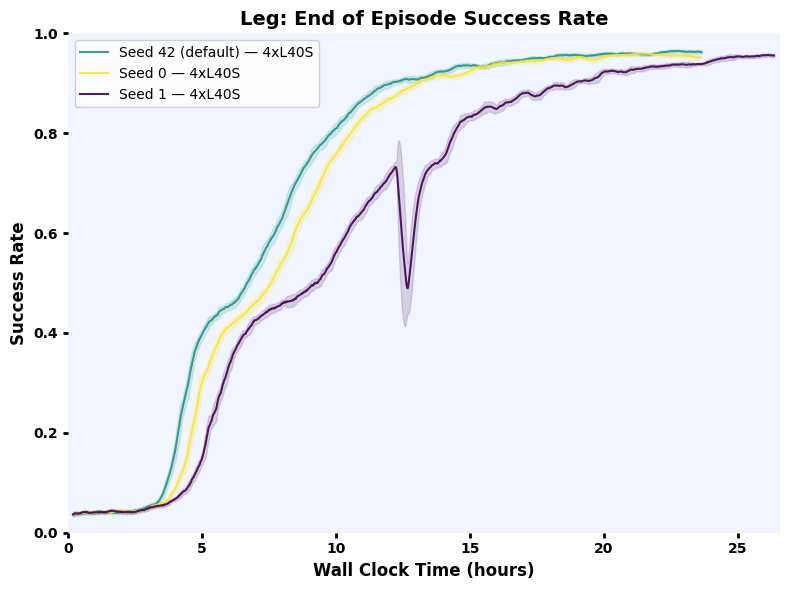
Training Curves
|
|
Note
Skip directly to Step 4 if you want to train an RL policy with our pre-generated reset state datasets. Only run Steps 1-3 if you want to generate your own.
Step 1: Collect Partial Assemblies (~30 seconds)
python scripts_v2/tools/record_partial_assemblies.py --task OmniReset-PartialAssemblies-v0 --num_envs 10 --num_trajectories 10 --headless env.scene.insertive_object=fbdrawerbottom env.scene.receptive_object=fbdrawerbox
Step 2: Sample Grasp Poses (~1 minute)
python scripts_v2/tools/record_grasps.py --task OmniReset-Robotiq2f85-GraspSampling-v0 --num_envs 8192 --num_grasps 1000 --headless env.scene.object=fbdrawerbottom
Step 3: Generate Reset State Datasets (~1 min to multiple hours depending on the reset and task)
# Object Anywhere, End-Effector Anywhere (Reaching)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectAnywhereEEAnywhere-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=fbdrawerbottom env.scene.receptive_object=fbdrawerbox
# Object Resting, End-Effector Grasped (Near Object)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectRestingEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=fbdrawerbottom env.scene.receptive_object=fbdrawerbox \
env.events.reset_insertive_object_pose_from_reset_states.params.dataset_dir=./Datasets/OmniReset \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
# Object Anywhere, End-Effector Grasped (Grasped)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectAnywhereEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=fbdrawerbottom env.scene.receptive_object=fbdrawerbox \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
# Object Partially Assembled, End-Effector Grasped (Near Goal)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectPartiallyAssembledEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=fbdrawerbottom env.scene.receptive_object=fbdrawerbox \
env.events.reset_insertive_object_pose_from_partial_assembly_dataset.params.dataset_dir=./Datasets/OmniReset \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
Step 3.5: Visualize Reset States (Optional)
Visualize the generated reset states to verify they are correct. By default all four reset distributions are loaded; use the tabs below to visualize one at a time.
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
env.scene.insertive_object=fbdrawerbottom env.scene.receptive_object=fbdrawerbox
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectAnywhereEEAnywhere \
env.scene.insertive_object=fbdrawerbottom env.scene.receptive_object=fbdrawerbox
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectRestingEEGrasped \
env.scene.insertive_object=fbdrawerbottom env.scene.receptive_object=fbdrawerbox
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectAnywhereEEGrasped \
env.scene.insertive_object=fbdrawerbottom env.scene.receptive_object=fbdrawerbox
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectPartiallyAssembledEEGrasped \
env.scene.insertive_object=fbdrawerbottom env.scene.receptive_object=fbdrawerbox
Step 4: Train RL Policy
Train with our pre-generated cloud datasets:
python -m torch.distributed.run \
--nnodes 1 \
--nproc_per_node 4 \
scripts/reinforcement_learning/rsl_rl/train.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-v0 \
--num_envs 16384 \
--logger wandb \
--headless \
--distributed \
env.scene.insertive_object=fbdrawerbottom \
env.scene.receptive_object=fbdrawerbox
Or, train with your locally generated datasets from Steps 1-3:
python -m torch.distributed.run \
--nnodes 1 \
--nproc_per_node 4 \
scripts/reinforcement_learning/rsl_rl/train.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-v0 \
--num_envs 16384 \
--logger wandb \
--headless \
--distributed \
env.scene.insertive_object=fbdrawerbottom \
env.scene.receptive_object=fbdrawerbox \
env.events.reset_from_reset_states.params.dataset_dir=./Datasets/OmniReset
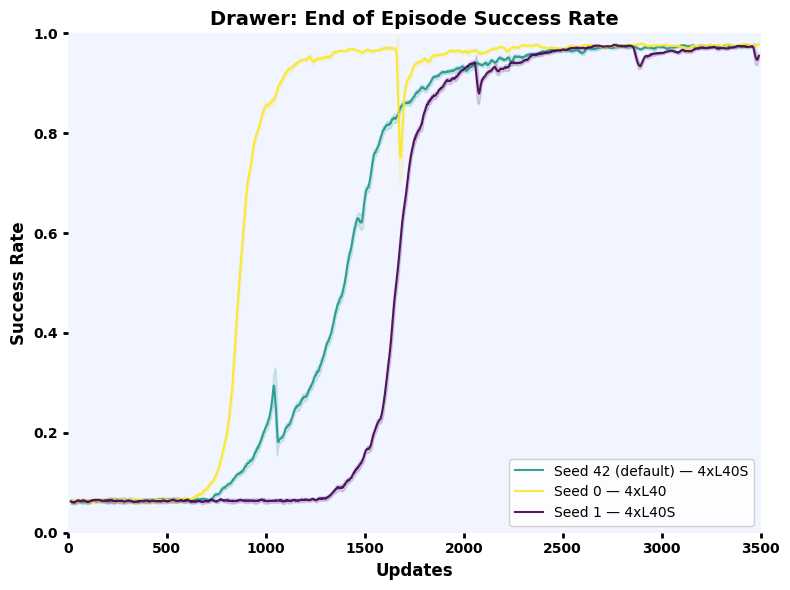
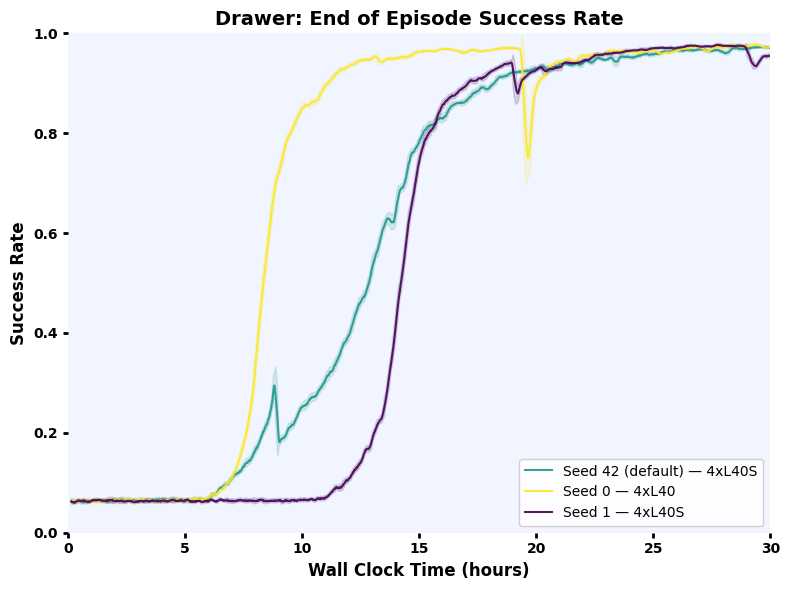
Training Curves
|
|
Note
Skip directly to Step 4 if you want to train an RL policy with our pre-generated reset state datasets. Only run Steps 1-3 if you want to generate your own.
Step 1: Collect Partial Assemblies (~30 seconds)
python scripts_v2/tools/record_partial_assemblies.py --task OmniReset-PartialAssemblies-v0 --num_envs 10 --num_trajectories 10 --headless env.scene.insertive_object=peg env.scene.receptive_object=peghole
Step 2: Sample Grasp Poses (~1 minute)
python scripts_v2/tools/record_grasps.py --task OmniReset-Robotiq2f85-GraspSampling-v0 --num_envs 8192 --num_grasps 1000 --headless env.scene.object=peg
Step 3: Generate Reset State Datasets (~1 min to multiple hours depending on the reset and task)
# Object Anywhere, End-Effector Anywhere (Reaching)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectAnywhereEEAnywhere-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=peg env.scene.receptive_object=peghole
# Object Resting, End-Effector Grasped (Near Object)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectRestingEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=peg env.scene.receptive_object=peghole \
env.events.reset_insertive_object_pose_from_reset_states.params.dataset_dir=./Datasets/OmniReset \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
# Object Anywhere, End-Effector Grasped (Grasped)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectAnywhereEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=peg env.scene.receptive_object=peghole \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
# Object Partially Assembled, End-Effector Grasped (Near Goal)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectPartiallyAssembledEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=peg env.scene.receptive_object=peghole \
env.events.reset_insertive_object_pose_from_partial_assembly_dataset.params.dataset_dir=./Datasets/OmniReset \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
Step 3.5: Visualize Reset States (Optional)
Visualize the generated reset states to verify they are correct. By default all four reset distributions are loaded; use the tabs below to visualize one at a time.
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
env.scene.insertive_object=peg env.scene.receptive_object=peghole
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectAnywhereEEAnywhere \
env.scene.insertive_object=peg env.scene.receptive_object=peghole
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectRestingEEGrasped \
env.scene.insertive_object=peg env.scene.receptive_object=peghole
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectAnywhereEEGrasped \
env.scene.insertive_object=peg env.scene.receptive_object=peghole
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectPartiallyAssembledEEGrasped \
env.scene.insertive_object=peg env.scene.receptive_object=peghole
Step 4: Train RL Policy
Train with our pre-generated cloud datasets:
python -m torch.distributed.run \
--nnodes 1 \
--nproc_per_node 4 \
scripts/reinforcement_learning/rsl_rl/train.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-v0 \
--num_envs 16384 \
--logger wandb \
--headless \
--distributed \
env.scene.insertive_object=peg \
env.scene.receptive_object=peghole
Or, train with your locally generated datasets from Steps 1-3:
python -m torch.distributed.run \
--nnodes 1 \
--nproc_per_node 4 \
scripts/reinforcement_learning/rsl_rl/train.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-v0 \
--num_envs 16384 \
--logger wandb \
--headless \
--distributed \
env.scene.insertive_object=peg \
env.scene.receptive_object=peghole \
env.events.reset_from_reset_states.params.dataset_dir=./Datasets/OmniReset
Training Curves
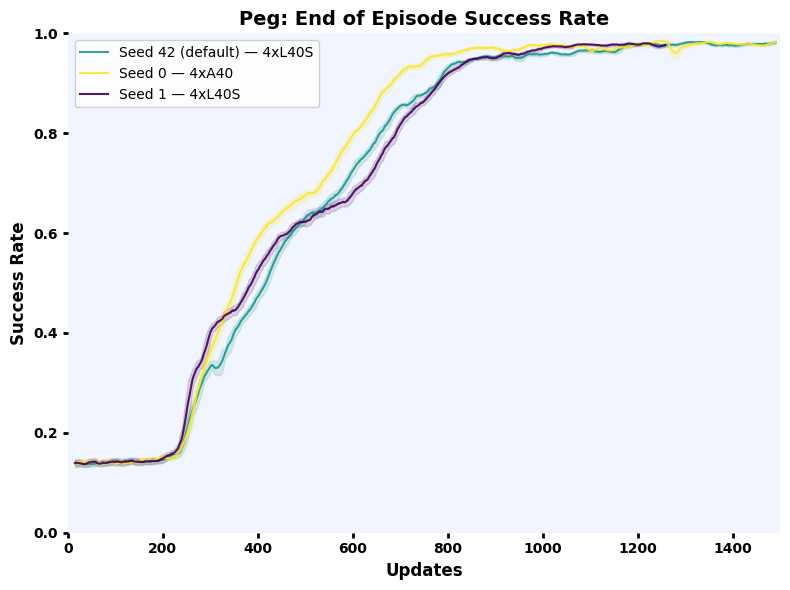
|
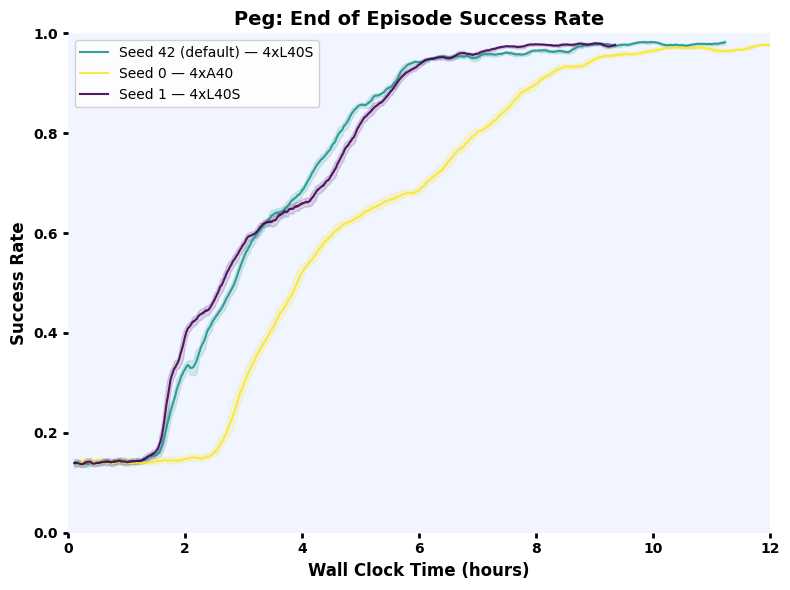
|
Note
Skip directly to Step 4 if you want to train an RL policy with our pre-generated reset state datasets. Only run Steps 1-3 if you want to generate your own.
Step 1: Collect Partial Assemblies (~30 seconds)
python scripts_v2/tools/record_partial_assemblies.py --task OmniReset-PartialAssemblies-v0 --num_envs 10 --num_trajectories 10 --headless env.scene.insertive_object=rectangle env.scene.receptive_object=wall
Step 2: Sample Grasp Poses (~1 minute)
python scripts_v2/tools/record_grasps.py --task OmniReset-Robotiq2f85-GraspSampling-v0 --num_envs 8192 --num_grasps 1000 --headless env.scene.object=rectangle
Step 3: Generate Reset State Datasets (~1 min to multiple hours depending on the reset and task)
# Object Anywhere, End-Effector Anywhere (Reaching)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectAnywhereEEAnywhere-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=rectangle env.scene.receptive_object=wall
# Object Resting, End-Effector Grasped (Near Object)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectRestingEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=rectangle env.scene.receptive_object=wall \
env.events.reset_insertive_object_pose_from_reset_states.params.dataset_dir=./Datasets/OmniReset \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
# Object Anywhere, End-Effector Grasped (Grasped)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectAnywhereEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=rectangle env.scene.receptive_object=wall \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
# Object Partially Assembled, End-Effector Grasped (Near Goal)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectPartiallyAssembledEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=rectangle env.scene.receptive_object=wall \
env.events.reset_insertive_object_pose_from_partial_assembly_dataset.params.dataset_dir=./Datasets/OmniReset \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
Step 3.5: Visualize Reset States (Optional)
Visualize the generated reset states to verify they are correct. By default all four reset distributions are loaded; use the tabs below to visualize one at a time.
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
env.scene.insertive_object=rectangle env.scene.receptive_object=wall
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectAnywhereEEAnywhere \
env.scene.insertive_object=rectangle env.scene.receptive_object=wall
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectRestingEEGrasped \
env.scene.insertive_object=rectangle env.scene.receptive_object=wall
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectAnywhereEEGrasped \
env.scene.insertive_object=rectangle env.scene.receptive_object=wall
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectPartiallyAssembledEEGrasped \
env.scene.insertive_object=rectangle env.scene.receptive_object=wall
Step 4: Train RL Policy
Train with our pre-generated cloud datasets:
python -m torch.distributed.run \
--nnodes 1 \
--nproc_per_node 4 \
scripts/reinforcement_learning/rsl_rl/train.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-v0 \
--num_envs 16384 \
--logger wandb \
--headless \
--distributed \
env.scene.insertive_object=rectangle \
env.scene.receptive_object=wall
Or, train with your locally generated datasets from Steps 1-3:
python -m torch.distributed.run \
--nnodes 1 \
--nproc_per_node 4 \
scripts/reinforcement_learning/rsl_rl/train.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-v0 \
--num_envs 16384 \
--logger wandb \
--headless \
--distributed \
env.scene.insertive_object=rectangle \
env.scene.receptive_object=wall \
env.events.reset_from_reset_states.params.dataset_dir=./Datasets/OmniReset
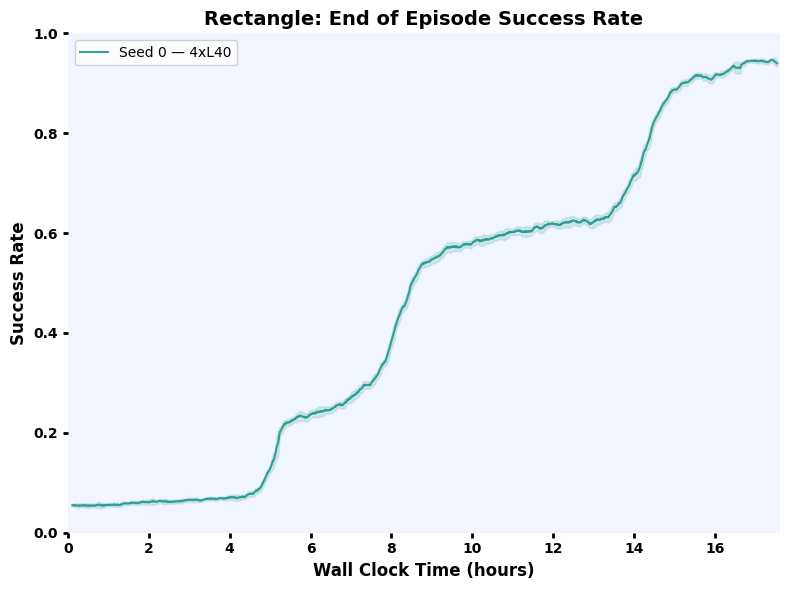
Warning
This task has the least stable training. Some seeds plateau around 60%; if a run dies, reload from a checkpoint before the crash. You may need to try a few seeds (plot below is seed 0).
Training Curves
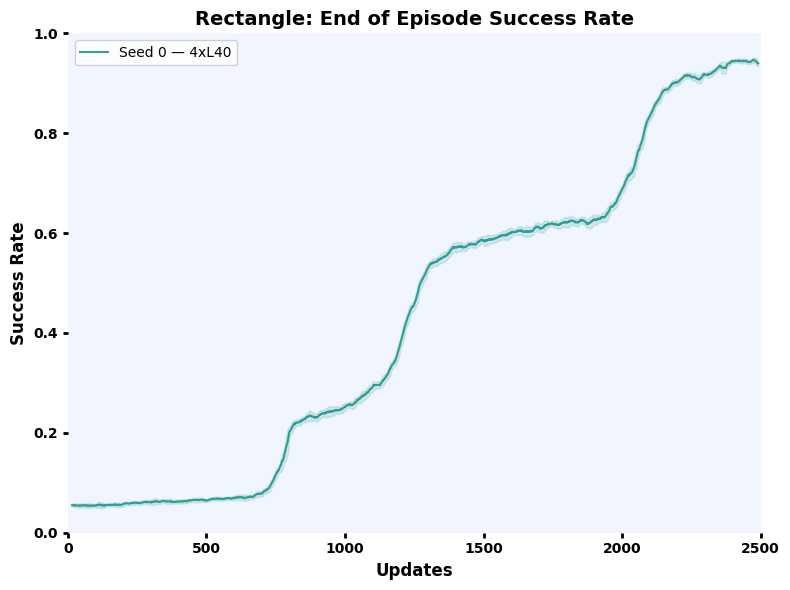
|
|
Note
Skip directly to Step 4 if you want to train an RL policy with our pre-generated reset state datasets. Only run Steps 1-3 if you want to generate your own.
Step 1: Collect Partial Assemblies (~30 seconds)
python scripts_v2/tools/record_partial_assemblies.py --task OmniReset-PartialAssemblies-v0 --num_envs 10 --num_trajectories 10 --headless env.scene.insertive_object=cube env.scene.receptive_object=cube
Step 2: Sample Grasp Poses (~1 minute)
python scripts_v2/tools/record_grasps.py --task OmniReset-Robotiq2f85-GraspSampling-v0 --num_envs 8192 --num_grasps 1000 --headless env.scene.object=cube
Step 3: Generate Reset State Datasets (~1 min to multiple hours depending on the reset and task)
# Object Anywhere, End-Effector Anywhere (Reaching)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectAnywhereEEAnywhere-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=cube env.scene.receptive_object=cube
# Object Resting, End-Effector Grasped (Near Object)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectRestingEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=cube env.scene.receptive_object=cube \
env.events.reset_insertive_object_pose_from_reset_states.params.dataset_dir=./Datasets/OmniReset \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
# Object Anywhere, End-Effector Grasped (Grasped)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectAnywhereEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=cube env.scene.receptive_object=cube \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
# Object Partially Assembled, End-Effector Grasped (Near Goal)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectPartiallyAssembledEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=cube env.scene.receptive_object=cube \
env.events.reset_insertive_object_pose_from_partial_assembly_dataset.params.dataset_dir=./Datasets/OmniReset \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
Step 3.5: Visualize Reset States (Optional)
Visualize the generated reset states to verify they are correct. By default all four reset distributions are loaded; use the tabs below to visualize one at a time.
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
env.scene.insertive_object=cube env.scene.receptive_object=cube
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectAnywhereEEAnywhere \
env.scene.insertive_object=cube env.scene.receptive_object=cube
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectRestingEEGrasped \
env.scene.insertive_object=cube env.scene.receptive_object=cube
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectAnywhereEEGrasped \
env.scene.insertive_object=cube env.scene.receptive_object=cube
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectPartiallyAssembledEEGrasped \
env.scene.insertive_object=cube env.scene.receptive_object=cube
Step 4: Train RL Policy
Train with our pre-generated cloud datasets:
python -m torch.distributed.run \
--nnodes 1 \
--nproc_per_node 4 \
scripts/reinforcement_learning/rsl_rl/train.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-v0 \
--num_envs 16384 \
--logger wandb \
--headless \
--distributed \
env.scene.insertive_object=cube \
env.scene.receptive_object=cube
Or, train with your locally generated datasets from Steps 1-3:
python -m torch.distributed.run \
--nnodes 1 \
--nproc_per_node 4 \
scripts/reinforcement_learning/rsl_rl/train.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-v0 \
--num_envs 16384 \
--logger wandb \
--headless \
--distributed \
env.scene.insertive_object=cube \
env.scene.receptive_object=cube \
env.events.reset_from_reset_states.params.dataset_dir=./Datasets/OmniReset
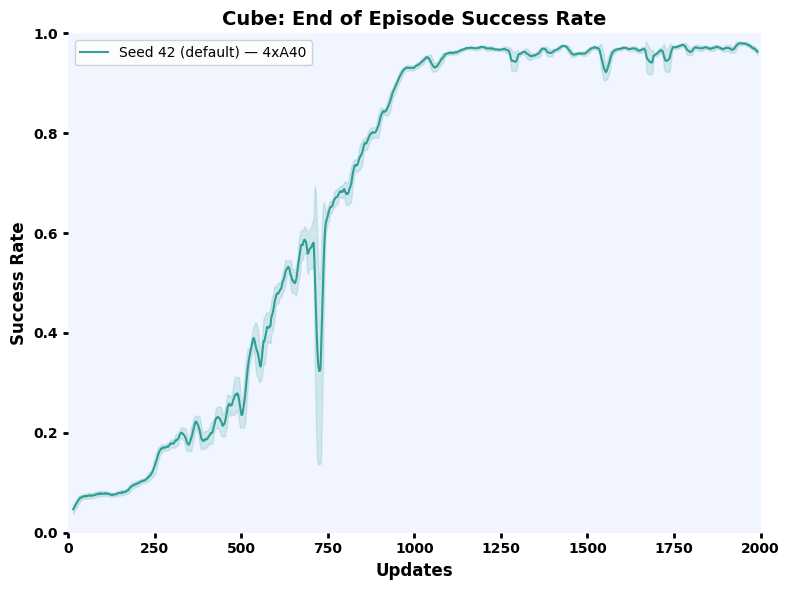
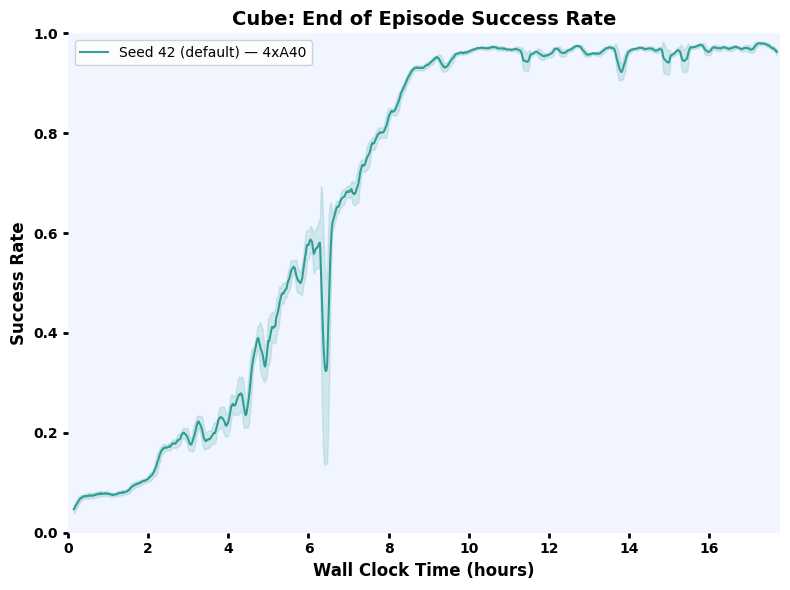
Training Curves
|
|
Note
Skip directly to Step 4 if you want to train an RL policy with our pre-generated reset state datasets. Only run Steps 1-3 if you want to generate your own.
Step 1: Collect Partial Assemblies (~30 seconds)
python scripts_v2/tools/record_partial_assemblies.py --task OmniReset-PartialAssemblies-v0 --num_envs 10 --num_trajectories 10 --headless env.scene.insertive_object=cupcake env.scene.receptive_object=plate
Step 2: Sample Grasp Poses (~1 minute)
python scripts_v2/tools/record_grasps.py --task OmniReset-Robotiq2f85-GraspSampling-v0 --num_envs 8192 --num_grasps 1000 --headless env.scene.object=cupcake
Step 3: Generate Reset State Datasets (~1 min to multiple hours depending on the reset and task)
# Object Anywhere, End-Effector Anywhere (Reaching)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectAnywhereEEAnywhere-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=cupcake env.scene.receptive_object=plate
# Object Resting, End-Effector Grasped (Near Object)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectRestingEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=cupcake env.scene.receptive_object=plate \
env.events.reset_insertive_object_pose_from_reset_states.params.dataset_dir=./Datasets/OmniReset \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
# Object Anywhere, End-Effector Grasped (Grasped)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectAnywhereEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=cupcake env.scene.receptive_object=plate \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
# Object Partially Assembled, End-Effector Grasped (Near Goal)
python scripts_v2/tools/record_reset_states.py \
--task OmniReset-UR5eRobotiq2f85-ObjectPartiallyAssembledEEGrasped-v0 \
--num_envs 4096 --num_reset_states 10000 --headless \
env.scene.insertive_object=cupcake env.scene.receptive_object=plate \
env.events.reset_insertive_object_pose_from_partial_assembly_dataset.params.dataset_dir=./Datasets/OmniReset \
env.events.reset_end_effector_pose_from_grasp_dataset.params.dataset_dir=./Datasets/OmniReset
Step 3.5: Visualize Reset States (Optional)
Visualize the generated reset states to verify they are correct. By default all four reset distributions are loaded; use the tabs below to visualize one at a time.
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
env.scene.insertive_object=cupcake env.scene.receptive_object=plate
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectAnywhereEEAnywhere \
env.scene.insertive_object=cupcake env.scene.receptive_object=plate
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectRestingEEGrasped \
env.scene.insertive_object=cupcake env.scene.receptive_object=plate
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectAnywhereEEGrasped \
env.scene.insertive_object=cupcake env.scene.receptive_object=plate
python scripts_v2/tools/visualize_reset_states.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-Play-v0 \
--num_envs 4 --dataset_dir ./Datasets/OmniReset \
--reset_type ObjectPartiallyAssembledEEGrasped \
env.scene.insertive_object=cupcake env.scene.receptive_object=plate
Step 4: Train RL Policy
Train with our pre-generated cloud datasets:
python -m torch.distributed.run \
--nnodes 1 \
--nproc_per_node 4 \
scripts/reinforcement_learning/rsl_rl/train.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-v0 \
--num_envs 16384 \
--logger wandb \
--headless \
--distributed \
env.scene.insertive_object=cupcake \
env.scene.receptive_object=plate
Or, train with your locally generated datasets from Steps 1-3:
python -m torch.distributed.run \
--nnodes 1 \
--nproc_per_node 4 \
scripts/reinforcement_learning/rsl_rl/train.py \
--task OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-v0 \
--num_envs 16384 \
--logger wandb \
--headless \
--distributed \
env.scene.insertive_object=cupcake \
env.scene.receptive_object=plate \
env.events.reset_from_reset_states.params.dataset_dir=./Datasets/OmniReset
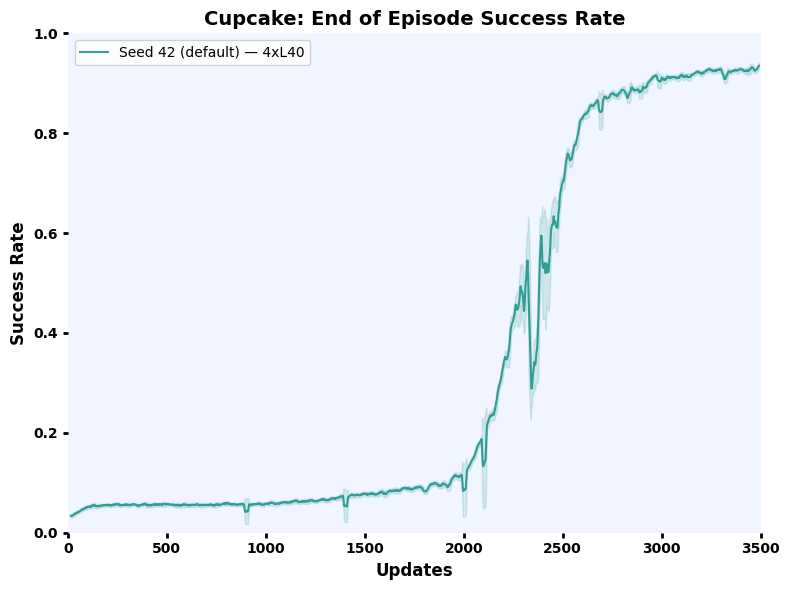
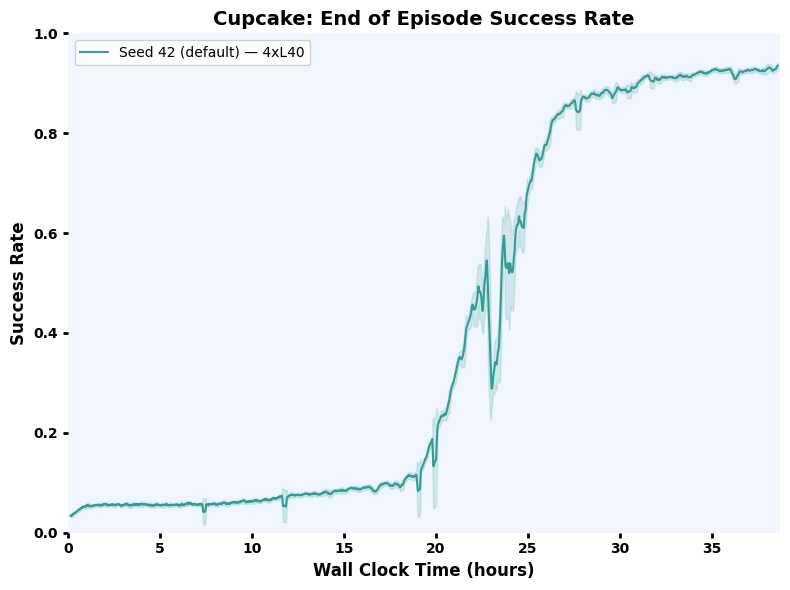
Training Curves
|
|
Modifying RSL-RL#
If you want to modify the RSL-RL algorithm (e.g. custom loss functions, network architectures, or training loops), you can install a local editable copy. Clone it as a sibling of UWLab:
parent_dir/
├── UWLab/
└── rsl_rl/
git clone https://github.com/UW-Lab/rsl_rl.git
cd rsl_rl
pip uninstall rsl-rl-lib
pip install -e .
Any changes you make to the cloned rsl_rl/ directory will take effect immediately without reinstalling.
Next Steps#
With a trained policy, you can:
Go sim-to-real: Continue to Sim2Real: SysID & RL Finetuning to finetune with system identification.
RGB student-teacher distillation: See Distillation & Deployment for collecting RGB data with the state-based expert and training an RGB BC policy.