Available UW Environments#
The following lists comprises of all the RL tasks implementations that are available in UW Lab. While we try to keep this list up-to-date, you can always get the latest list of environments by running the following command:
python scripts/environments/list_envs.py
python scripts\environments\list_envs.py
Single-agent#
Manipulation#
Environments based on fixed-arm manipulation tasks.
World |
Environment ID |
Description |
|---|---|---|
|
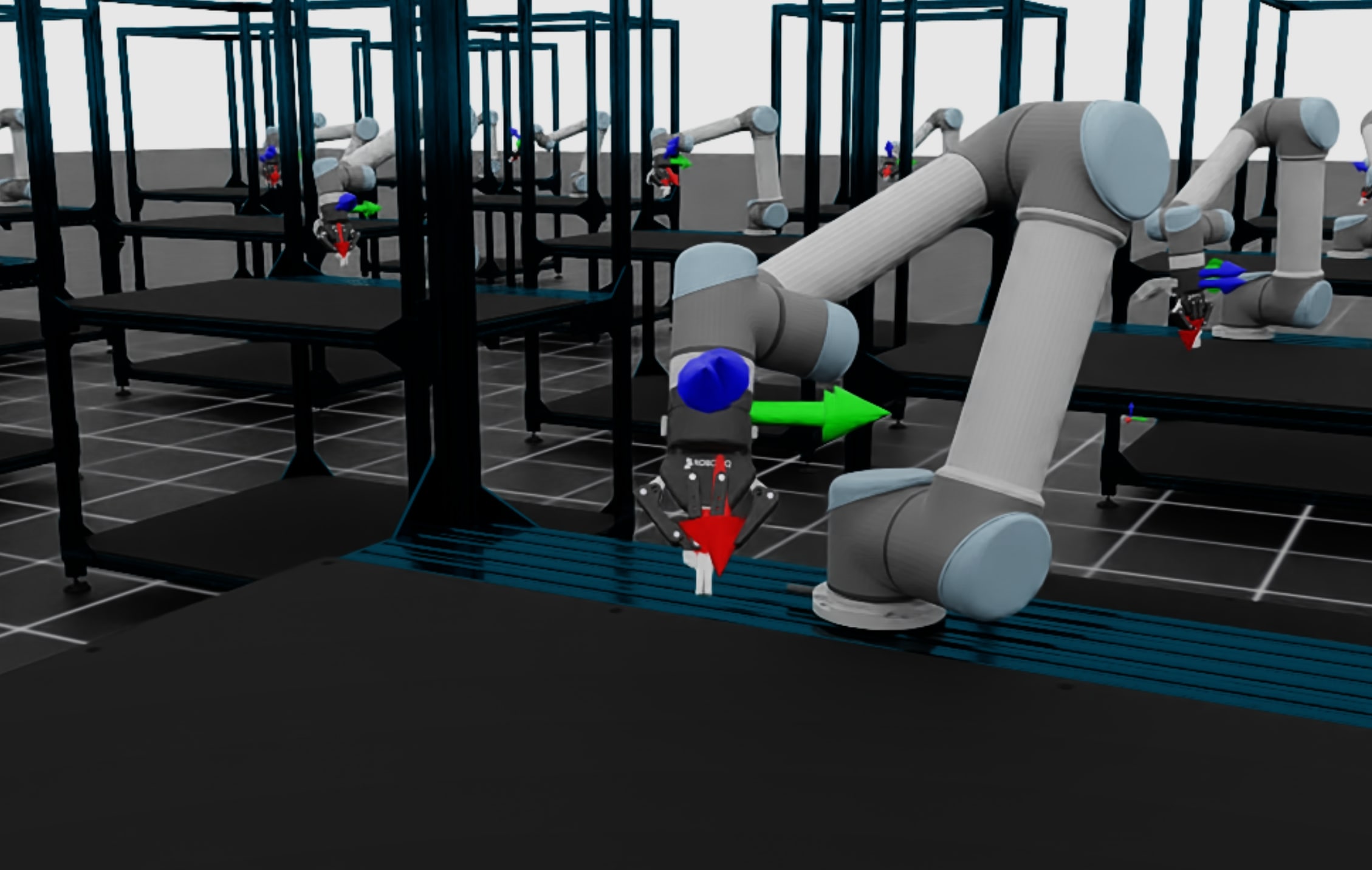
Goal tracking with Ur5 robot with Robotiq gripper |
|
|
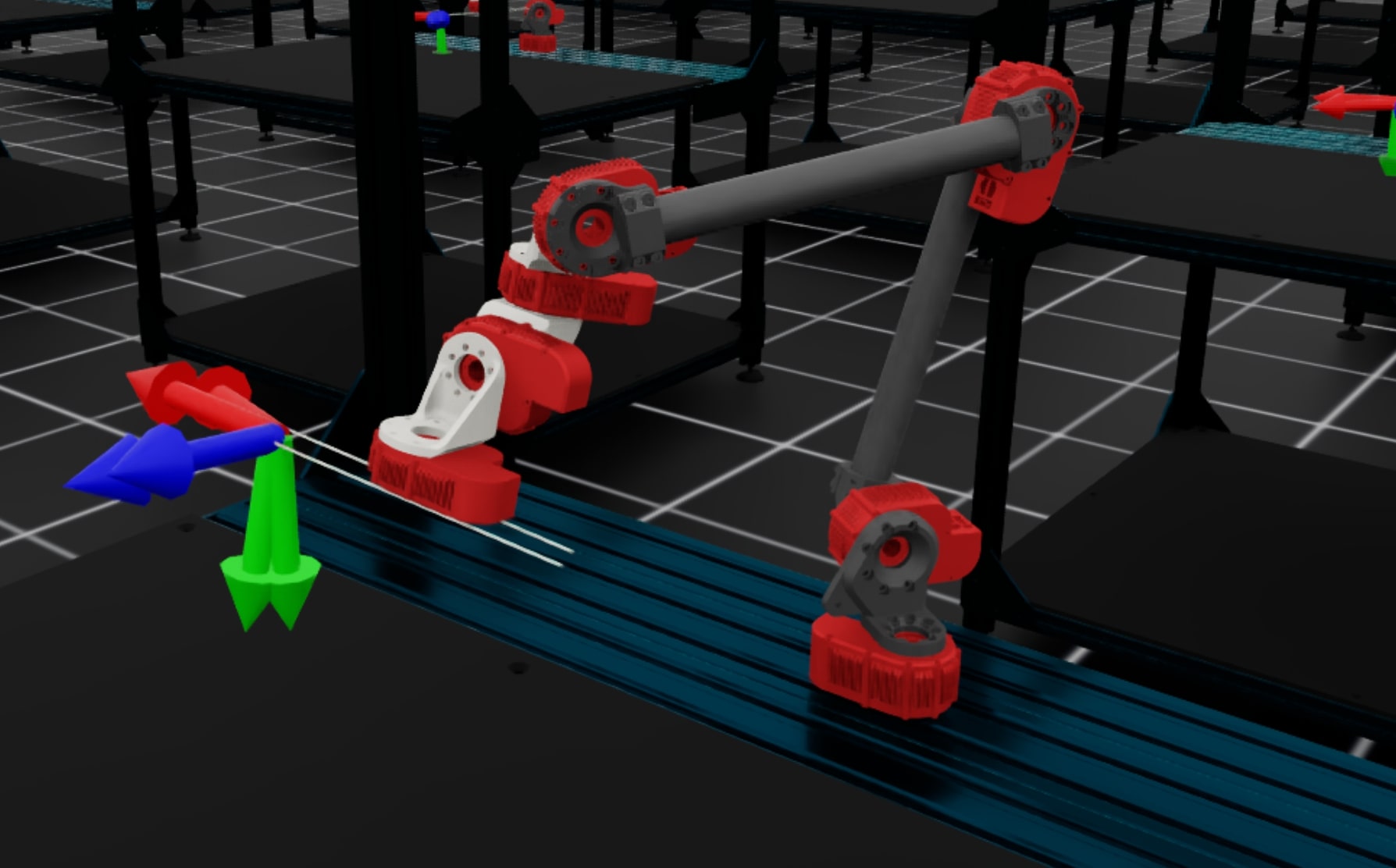
Goal tracking with Tycho robot |
|
|
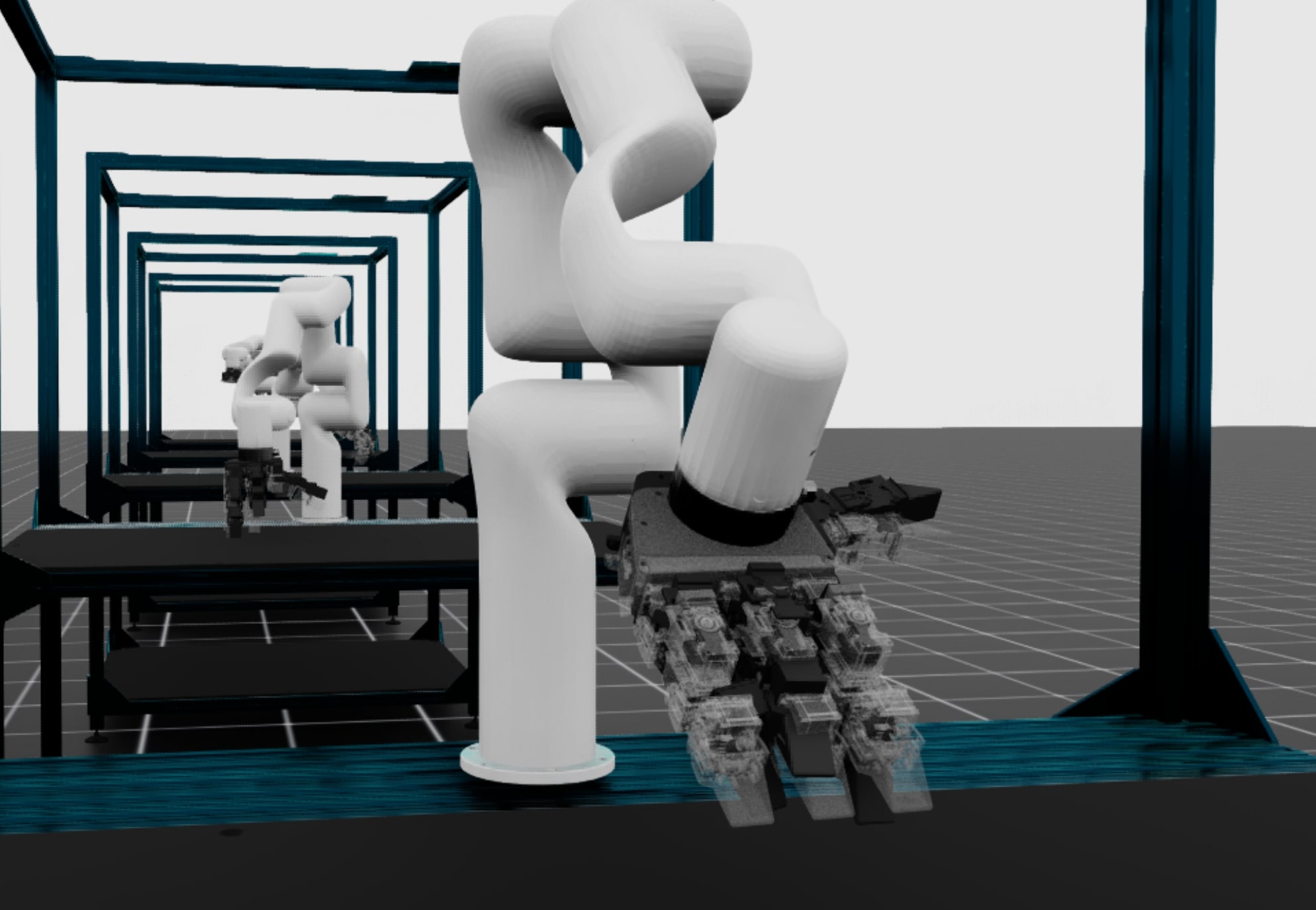
Goal tracking with Xarm with Leap Hand robot |
|
|
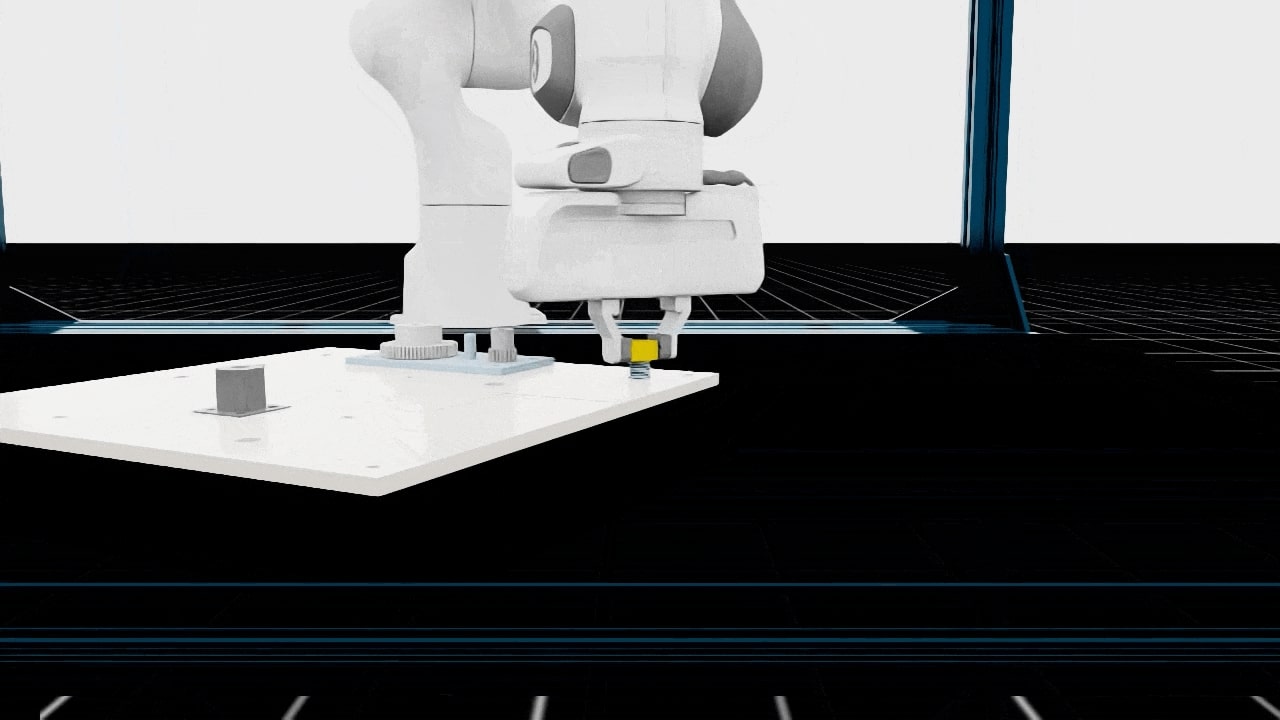
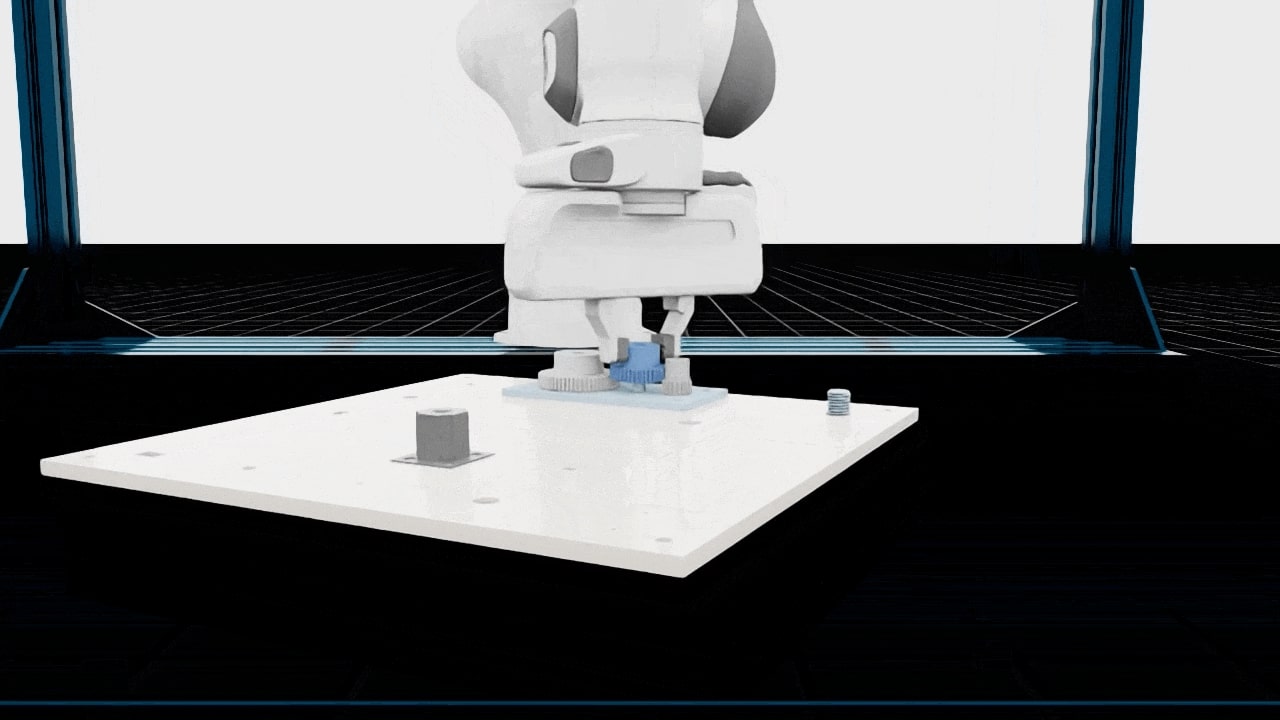
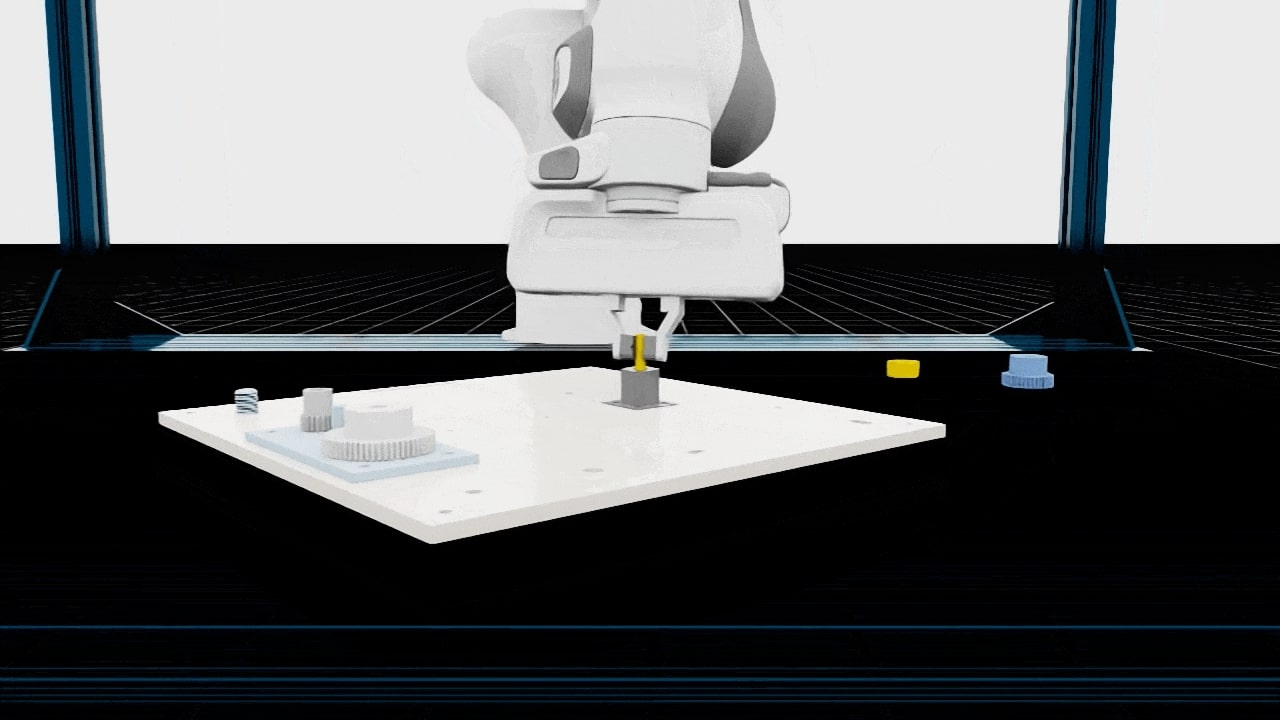
Threading nut on to bolt on nist board |
|
|
Inserting gear on to gear base on nist board |
|
|
Inserting peg rod into hole on nist board |
|
|
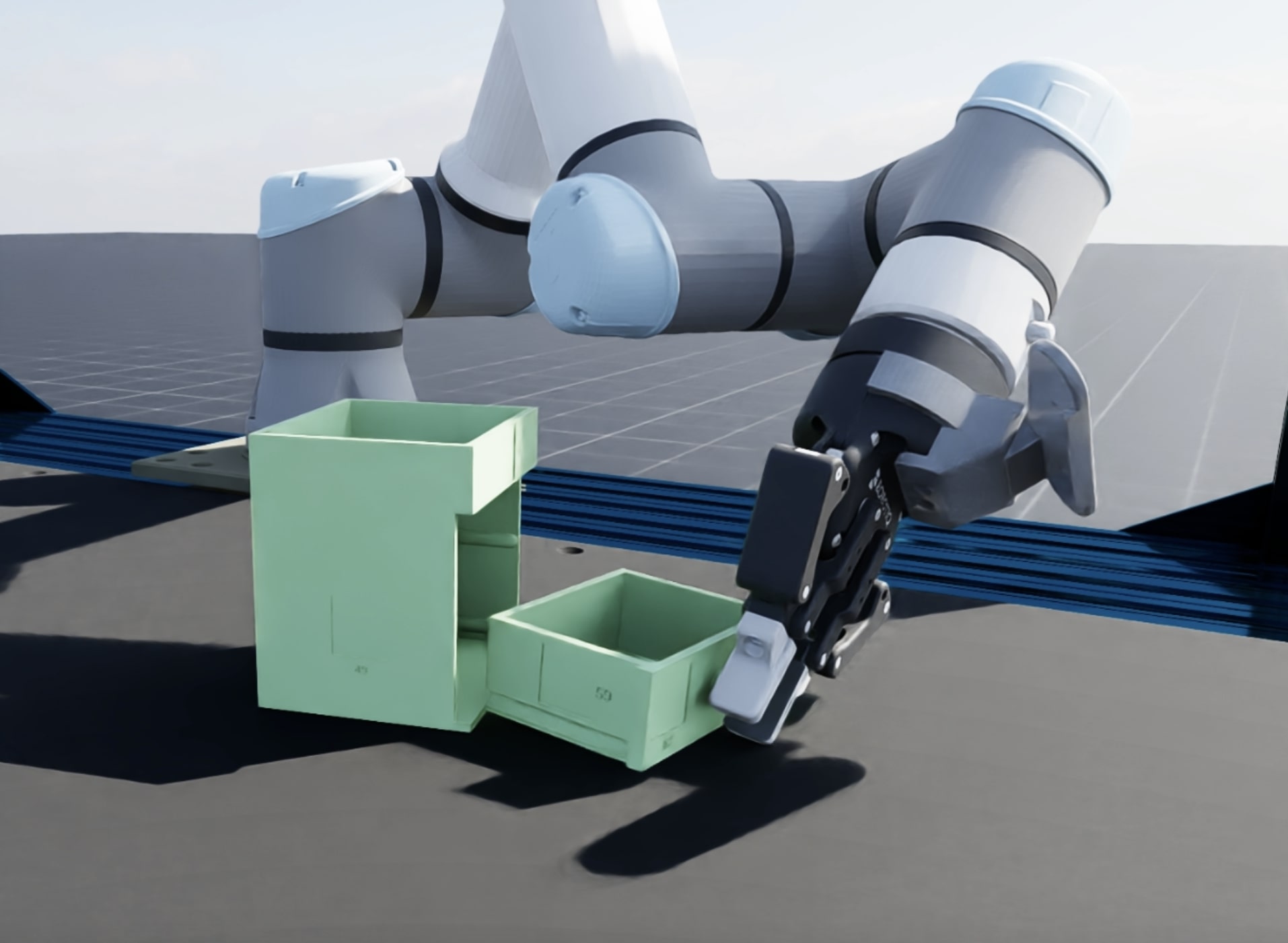
Assemble drawer into the bottom of cabinet |
|
|
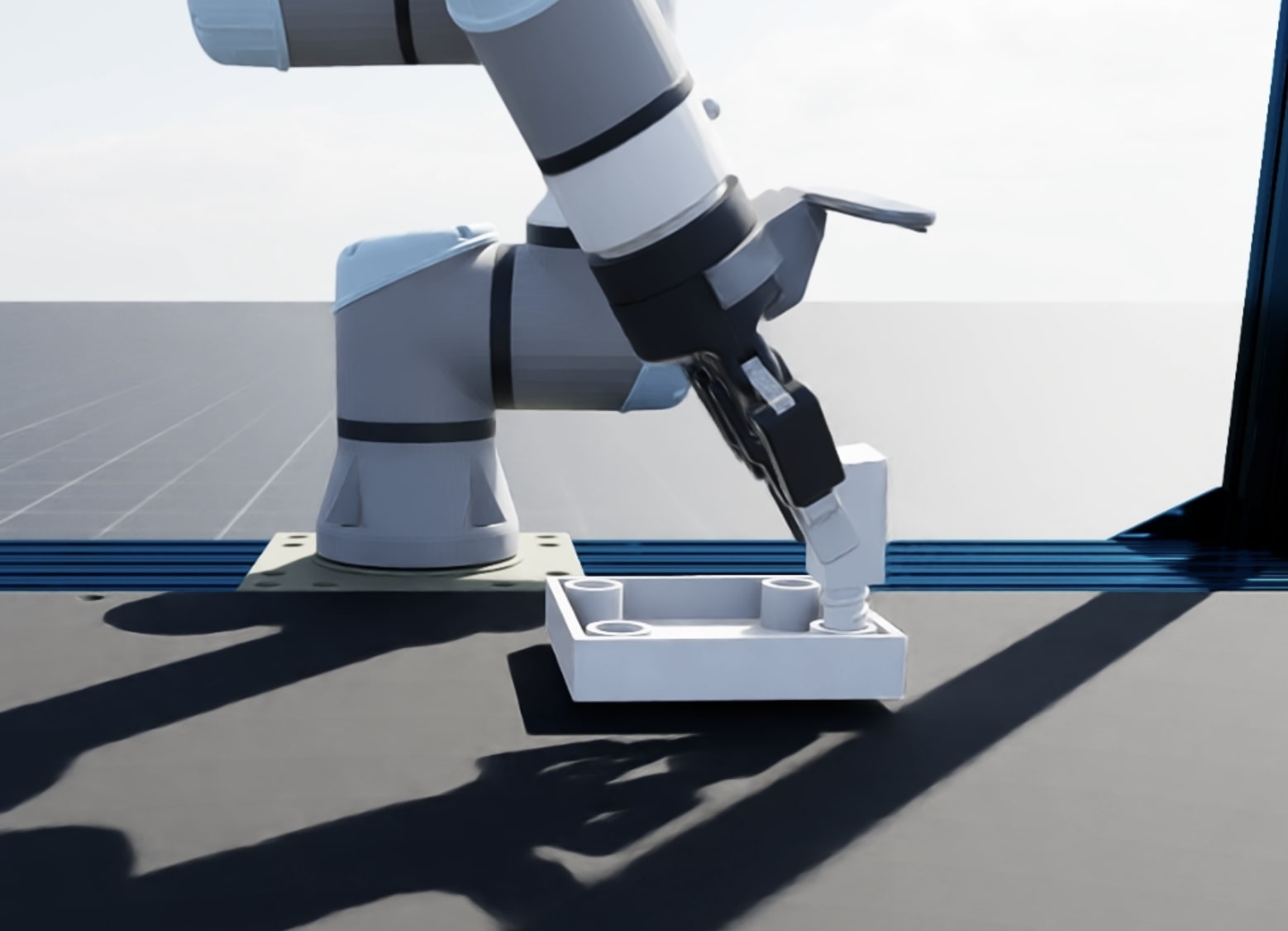
Insert and twist leg into a furniture bench table top |
|
|
Insert a square peg into the square peg hole |
|
|
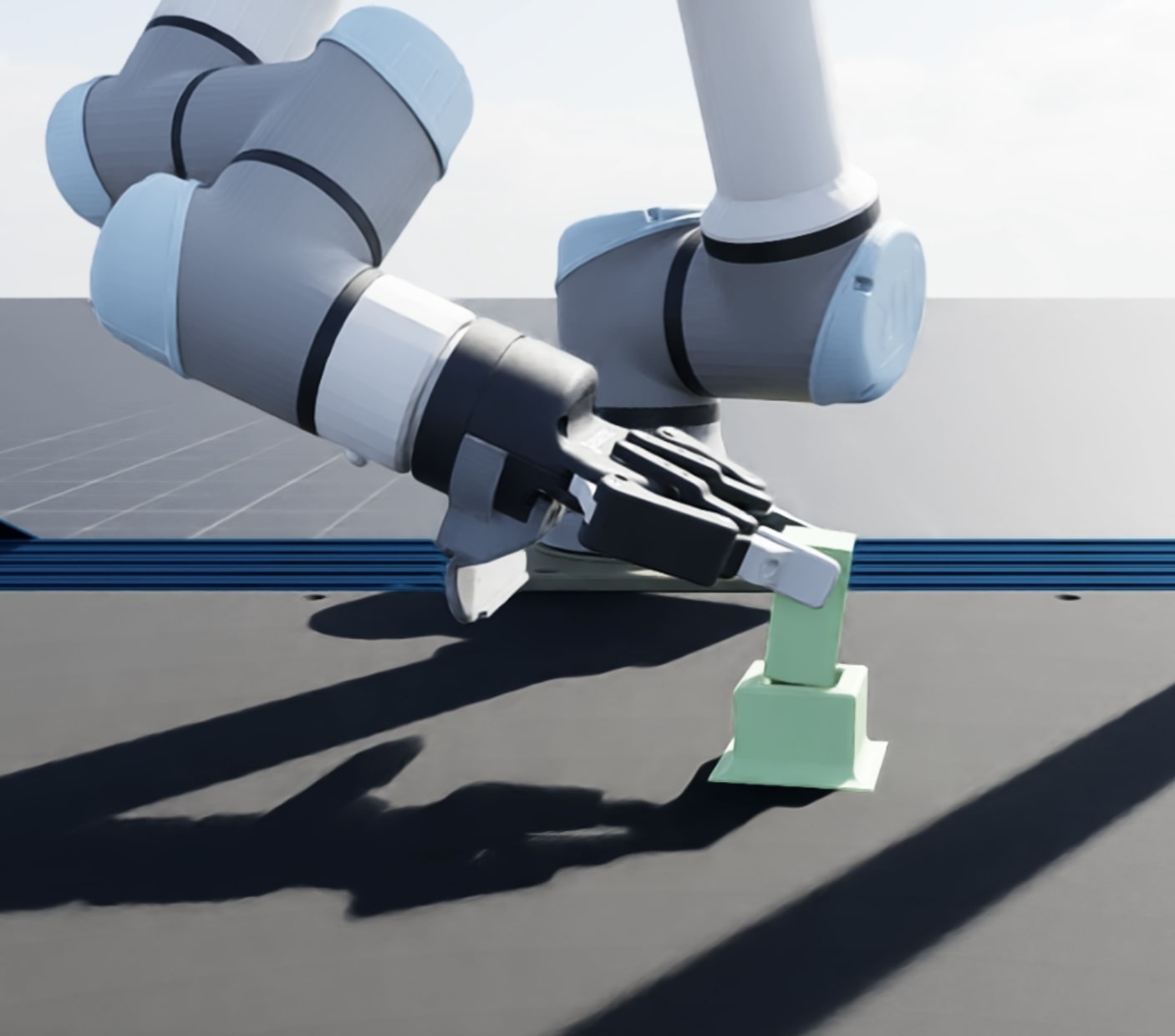
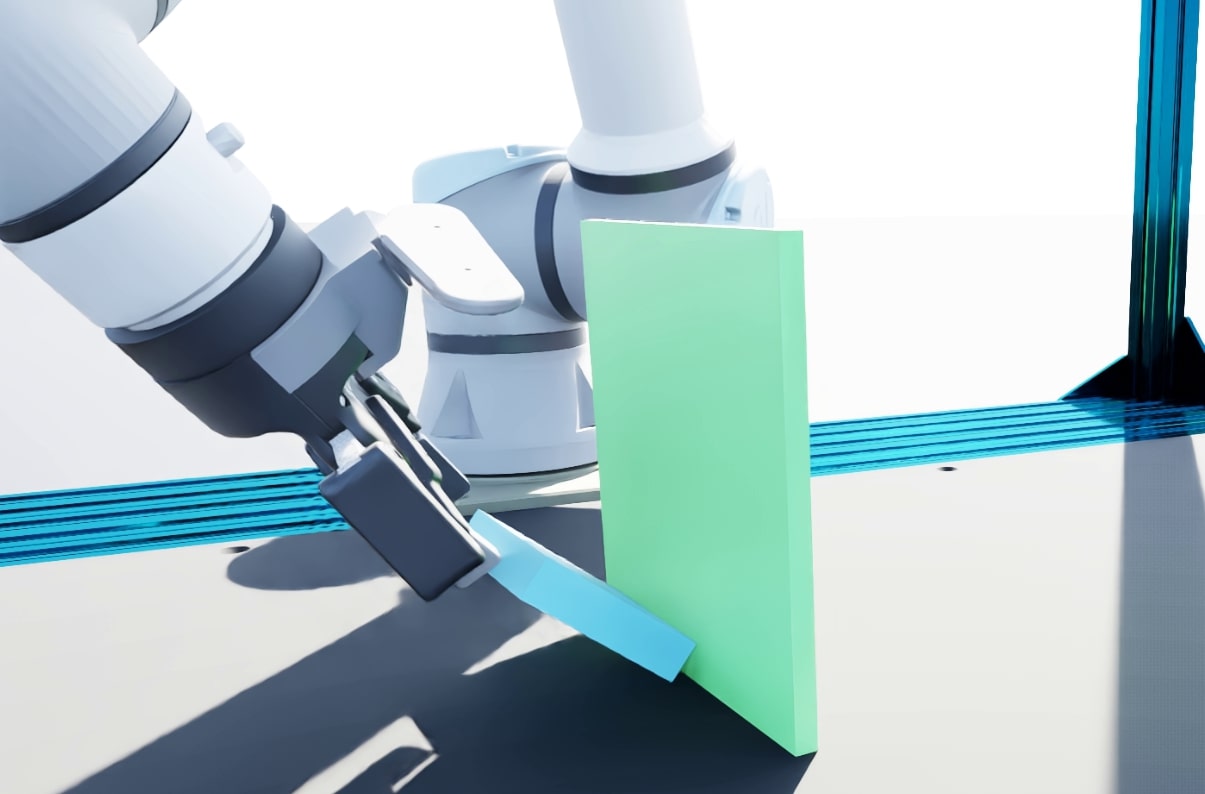
Orient a rectangle into desired location during a wall |
|
|
Place a cupcake into desired location on a plate |
|
|
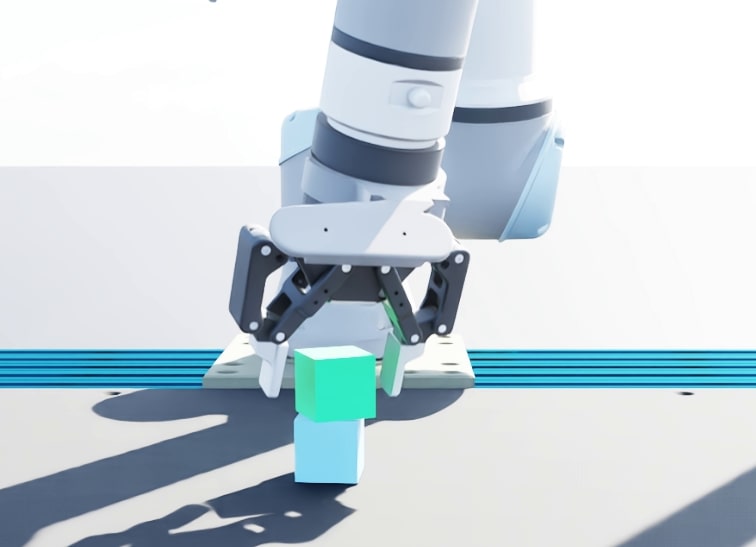
Stack one cube on top of another cube in a desired orientation. |

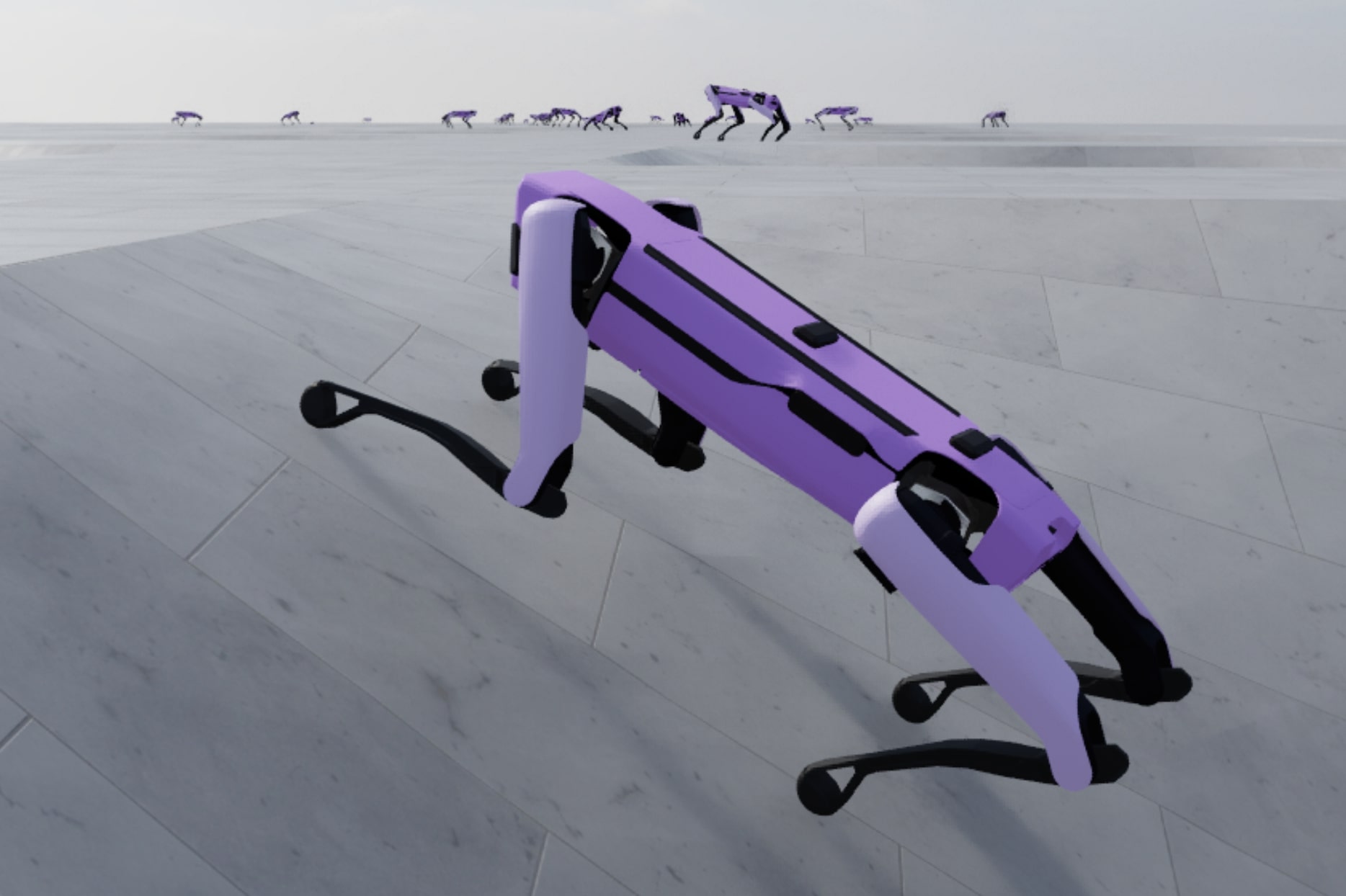
Locomotion#
Environments based on legged locomotion tasks.
World |
Environment ID |
Description |
|---|---|---|
|
Track a position command on gap terrain with the Spot robot |
|
|
Track a position command on pit terrain with the Spot robot |
|
|
Track a position command on stepping stone terrain with the Spot robot |
|
|
Track a position command on inverse slope terrain with the Spot robot |
|
|
Track a position command on obstacle terrain with the Spot robot |




Comprehensive List of Environments#
Task Name |
Inference Task Name |
Workflow |
RL Library |
UW-Track-Goal-Ur5-v0 |
Manager Based |
rsl_rl (PPO) |
|
UW-Track-Goal-Tycho-v0 |
Manager Based |
rsl_rl (PPO) |
|
UW-Track-Goal-Xarm-Leap-v0 |
Manager Based |
rsl_rl (PPO) |
|
UW-Nut-Thread-Franka-v0 |
Manager Based |
rsl_rl (PPO) |
|
UW-Gear-Mesh-Franka-v0 |
Manager Based |
rsl_rl (PPO) |
|
UW-Peg-Insert-Franka-v0 |
Manager Based |
rsl_rl (PPO) |
|
UW-Position-Gap-Spot-v0 |
Manager Based |
rsl_rl (PPO) |
|
UW-Position-Pit-Spot-v0 |
Manager Based |
rsl_rl (PPO) |
|
UW-Position-Stepping-Stone-Spot-v0 |
Manager Based |
rsl_rl (PPO) |
|
UW-Position-Obstacle-Spot-v0 |
Manager Based |
rsl_rl (PPO) |
|
UW-Position-Inv-Slope-Spot-v0 |
Manager Based |
rsl_rl (PPO) |
|
OmniReset-Ur5eRobotiq2f85-RelJointPos-State-v0 |
Manager Based |
rsl_rl (PPO) |
|
OmniReset-Ur5eRobotiq2f85-RelCartesianOSC-State-v0 |
Manager Based |
rsl_rl (PPO) |