Parental Guidance(PG1)#
Links#
Paper on OpenReview: Parental Guidance: Efficient Lifelong Learning through Evolutionary Distillation
GitHub Repository: UW Lab GitHub
Authors#
Zhengyu Zhang †, Quanquan Peng ‡, Rosario Scalise †, Byron Boots †
† Paul G Allen School, University of Washington ‡ Shanghai Jiao Tong University
Abstract#
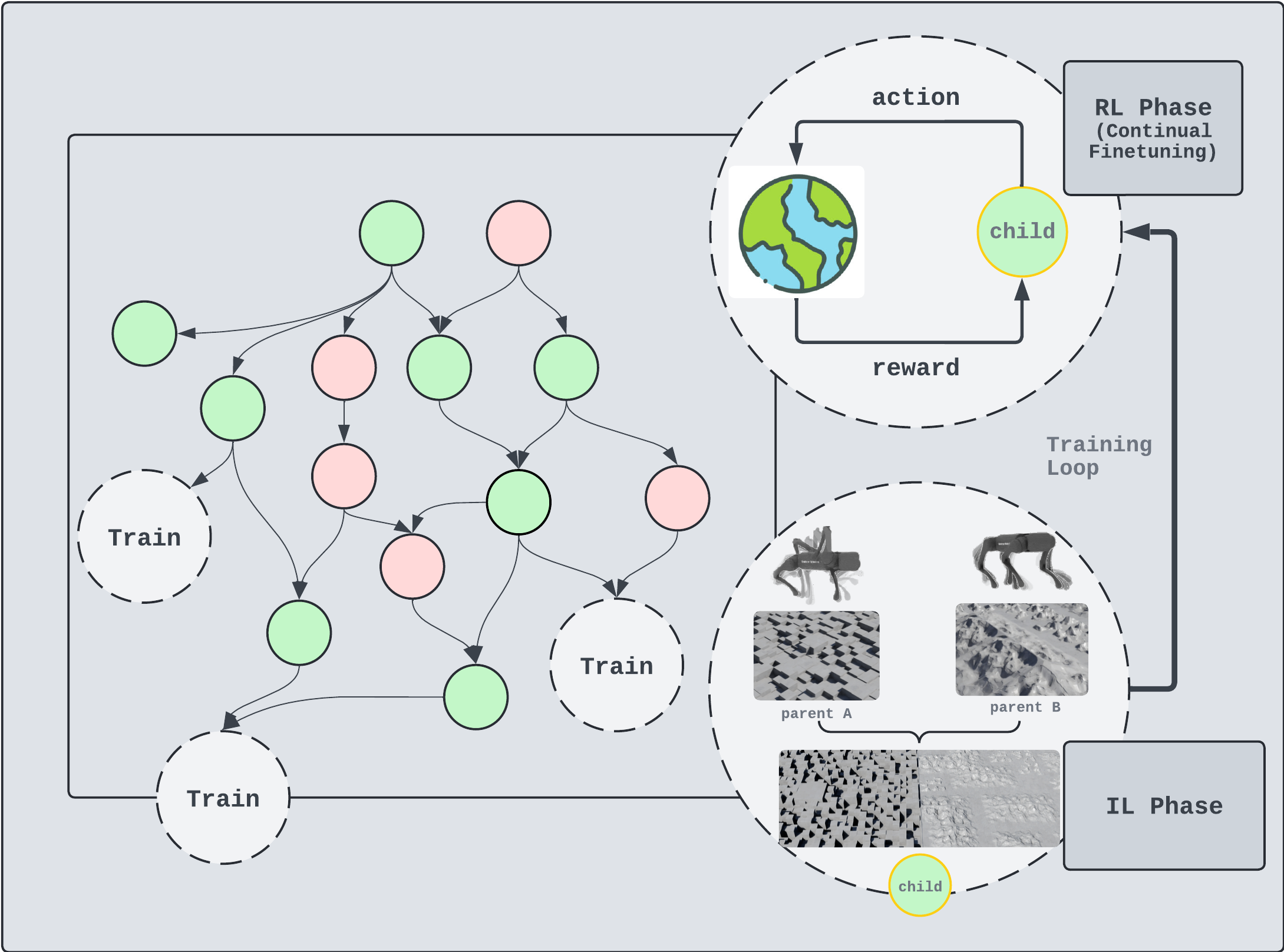
Developing robotic agents that can perform well in diverse environments while showing a variety of behaviors is a key challenge in AI and robotics. Traditional reinforcement learning (RL) methods often create agents that specialize in narrow tasks, limiting their adaptability and diversity. To overcome this, we propose a preliminary, evolution-inspired framework that includes a reproduction module, similar to natural species reproduction, balancing diversity and specialization. By integrating RL, imitation learning (IL), and a coevolutionary agent-terrain curriculum, our system evolves agents continuously through complex tasks. This approach promotes adaptability, inheritance of useful traits, and continual learning. Agents not only refine inherited skills but also surpass their predecessors. Our initial experiments show that this method improves exploration efficiency and supports open-ended learning, offering a scalable solution where sparse reward coupled with diverse terrain environments induces a multi-task setting.
BibTex#
@inproceedings{
zhang2024blending,
title={Blending Reinforcement Learning and Imitation Learning for Evolutionary Continual Learning},
author={Zhengyu Zhang and Quanquan Peng and Rosario Scalise and Byron Boots},
booktitle={[CoRL 2024] Morphology-Aware Policy and Design Learning Workshop (MAPoDeL)},
year={2024},
url={https://openreview.net/forum?id=d2VTtWOCMm}
}